|
1- Directement en ligne ici >>> |
3- mesures |
 |
|
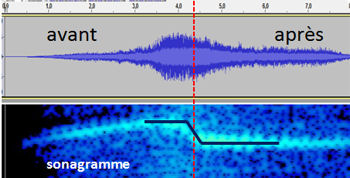
2- A l'aide d'un logiciel de traitement de sons tel que "AUDACITY" avec le fichier son de la séquence vidéo :
- comme ce son n'est pas un son musical, il sera prudent de faire une mesure de plusieurs périodes après avoir zoomé.
- on pourra aussi éventuellement faire une analyse harmonique pour vérifier.
ATTENTION : Comme le montre le sonagramme ci-contre (spectre des fréquences), la fréquence du sons avant passage n'est constante qu'à partir d'environ t= 3.2s jusqu'à environ t=4s. |
moto.wav |
 |
|
3- A l'aide du logiciel SYNCHRONIE et des 2 fichiers suivants
- comme ce son n'est pas un son musical, il sera prudent de faire une mesure de plusieurs périodes .
- on pourra aussi faire une analyse harmonique pour vérifier .
|
moto1.sn2 (approche)
moto2.sn2 (éloignement) |
 |
|
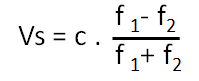
| 3- Calcul de la vitesse de la moto |
| Cette moto respectait-elle la limitation de vitesse sur cette portion de route à 70 km/h? |
|
|
| 4- complément : un peu de raisonnement et de calcul |
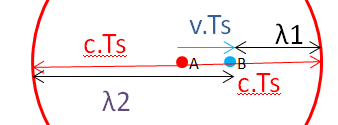
- Quand l'onde a parcouru c.Ts, la moto a parcouru v.Ts. ( Ts étant la période de l'onde sonore) . Pendant ce temps la moto est passée de A (emission d'un signal)à B où un autre signal est émis.
- λ1 représente la longueur d'onde perçue par l'observateur à l'avant de la moto.
- λ2 représente la longueur d'onde perçue par l'observateur à l'arrière de la moto.
Retrouver les expressions de f1 et f2 données question 1. |
 |
|
|